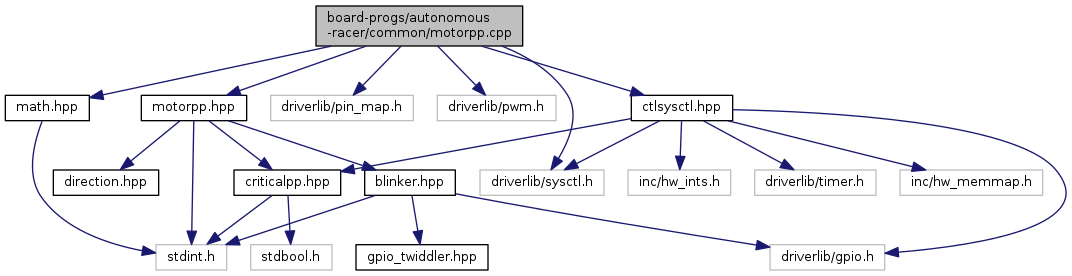
#include "motorpp.hpp"
#include "driverlib/sysctl.h"
#include "driverlib/pin_map.h"
#include "driverlib/pwm.h"
#include "ctlsysctl.hpp"
#include "math.hpp"
Go to the source code of this file.
 1.8.9.1
1.8.9.1 
